
液压挖掘机是一种在土建施工中广泛应用的土方机械。其工作过程常伴有强烈的振动、噪声、粉尘等,驾驶员常处于高度紧张状态下操纵,劳动强度大,极易疲惫。近年来,随着施工机械化迅速发展,越来越迫切需要实现挖掘机作业操纵的自动化、智能化。
液压挖掘机的机械液压系统具有较大的惯性质量,包含很多非线性因素,动态特性变化大且不稳定,在施工中每一具体操纵的内容和要求都不确定,很难形成一定规律,对驾驶员的操纵技能要求较高。因此,实现挖掘机作业的自动化,并不是仅靠简单动作的自动化和顺序控制就能实现的。采用一般的控制算法是很难满足控制要求的,需要将各种控制技术综合应用。为了使挖掘性能达到熟练驾驶员的判定能力和作业效果,本文将模糊控制理论应用于挖掘机轨迹控制中,将反映熟练驾驶员的操纵规律作为控制算法输进计算机,通过模糊推理控制,达到熟练驾驶员的作业水平。
1 液压挖掘机的工作装置
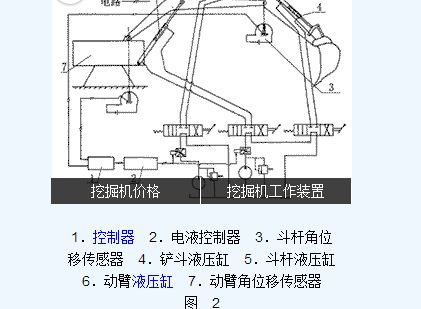
以我校机电一体化实验室的液压挖掘机模型为例。其工作装置的结构见图1,液压及电液控制原理图见图2。
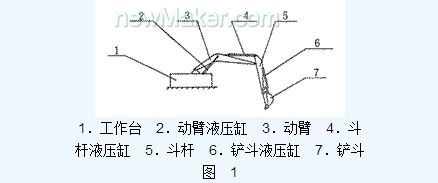
铲斗齿尖的运动轨迹由动臂、斗杆、铲斗三个杆件的复合运动合成。齿尖轨迹的每一位置都可由动臂相对转台、斗杆相对动臂、铲斗相对斗杆的转角来唯一表示[1],齿尖的运动轨迹控制可通过对这三个角度的控制来实现。
本实验装置中,动臂相对转台的铰点,斗杆相对动臂的铰点上分别安装了角位移传感器,用以检测其各个时刻的位置转角。由于经费题目,本装置在控制过程中仅对动臂、斗杆进行控制,将铲斗锁死。通过编程计算或人工示教的方式,可获得对应于齿尖的任意运动轨迹的动臂和斗杆的角度序列,且对应于齿尖的一定运动轨迹,动臂和斗杆的各位置角度间存在一定的函数关系。例如,当完成直线水平挖掘时,动臂的相对位角Φ1和斗杆的相对位角Φ2间的函数关系Φ2=f(Φ1)可用图3曲线表示。
2 基于角度的模糊控制系统
模糊控制方法,以专家把握的定性知识为基础,用模糊数学的方法,建立系统输进与输出的模糊集以及它们之间的模糊关系,天生非解析的控制规律映射模型,从而摆脱对精确模型的依靠。
对于挖掘机这类工程建设机械,由于其机械液压结构复杂,存在很多非线性因素,控制系统的正确数学模型很难建立。况且对于一个熟练的挖掘机驾驶员来说,他并不需要分析系统的模型结构,而只是凭借自己的经验,通过一些不精确的观察,执行一些不精确的操纵,就能很好地驾驶一台挖掘机,完成规定的轨迹操纵。因此,可采用模糊控制理论,将熟练驾驶员的操纵规律作为算法输进计算机,通过模糊推理控制,实现熟练驾驶员的作业水平。
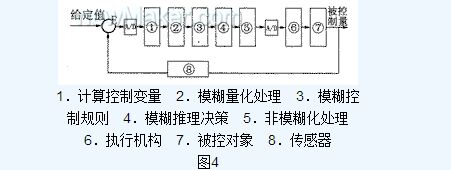
挖掘机的模糊控制系统由四个部分组成,模糊控制系统框图见图4。
(1)模糊控制器:选用MCS-51系列单片机作为CPU,将依据熟练驾驶员的操纵经验形成的控制规律以一定的模糊控制规则的形式存储在单片机中。
(2)输进/输出接口装置:模糊控制器通过输进接口从被控对象获得其位置信号,并将模糊控制器决策输出经数模转换为模拟信号,送给执行机构—电液比例阀。在I/O接口装置中,除A/D、D/A转换外,还应包括必要的电平转换线路。
(3)被控对象及执行机构:主要是动臂及动臂液压缸,斗杆及斗杆液压缸,及安装在其上的电液比例阀。
(4)传感器:选用电阻式角位移传感器,分辨率为0.5°。
3 基于角度控制的模糊控制器
模糊控制器的原理见图5。
模糊控制器的输进信号为角度偏差E(N)及角度偏差的变化率EC(N),输出信号为U(N),经转换后作为被控对象的输进信号U(t),被控对象的输出为y(t),经采样其离散信号为Y(N),被控制量设定值连续信号为r(t),其离散信号为R(N)。
前文已提到,对应一定的齿尖运动轨迹,每一时刻都可由动臂、斗杆的相对位置唯一确定。以此作为被控制量的目标转角R(N),由角位移传感器测得这一时刻的实际值Y(N),由此可得这一时刻的角度偏差E(N)=R(N)-Y(N),角度位置偏差变化率EC(N)=E(N)-E(N-1),按照模糊控制规则,进行模糊推理,决策出控制变量的一个模糊子集,再按照最大隶属度原则进行非模糊化,得出这一时刻的控制输出量U(N)。
模糊控制规则的建立,主要依据人们的长期实践经验,这也正是模糊控制体现人工智能之处,通过对挖掘机的整个作业过程的观察和手动控制的大量实践,根据把握的一些经验数据,采用Mamdian方法,推理合成控制规则。这个控制规则可表现为:当误差为负大时,若误差的变化为负,则这时误差有增大的趋势,应尽快消除已有的负大误差,所以控制量应取正大。当误差为负而误差变化为正,这时工装已具有减少误差的趋势,应尽快消除误差而又不超调,控制量应取正中或正小;而当误差变化为正大时,则取控制量为0。当误差为负中,控制量选取同误差为负大时。当误差为负小,工装接近目标位置,这时若误差变化为负,应选择控制量为正中;若误差变化为正,应选控制量为正小即可。总之,当误差为大或较大,选择控制量应以尽快消除误差为主,当误差为较小,选择控制量应以防止超调,不影响系统的稳定性为主。当误差为正时的控制规律,与误差为负时的控制规律基本一致,只是符号不同,具体控制规律见表1。
按照表中的控制规律,可得出模糊关系阵R=(EI×ECj×UI,j),其隶属度函数可表示为:
μR(e,ec,u)=(μEi(e)∧μEcj(ec)∧μUij(u))
式中:μEi(e)、μEcj(ec)、μUij(u)分别为E、EC、U的隶属度函数。
按照最大隶属度原则对关系矩阵R进行清楚化,可得控制规则表[1]。根据经验的不断总结、更新,控制规则表也应不断修改。可将这一规则表以表格的形式存储在单片机中,则在每次实施角度控制时,根据已得的偏差及偏差变化率,将其离散化,通过查表,将得到的结果在输出量上进行清楚化,最后得到的结果即为作用在被控制对象上的控制量。
采用模糊控制算法进行挖掘机轨迹控制,具有较强的适应性、灵活性,对于不同的土质、操纵对象,在进行相同轨迹挖掘控制时,不需要重新调节系数,挖掘效果更接近熟练工人的操纵水平。
由于模糊控制是一种新兴的智能控制理论,近年才应用于工程建设机械中,本文仅对其应用于挖掘机的轨迹控制进行了讨论,相信今后模糊控制理论在工程建设机械领域将会得到更加广泛的应用。

